

Revo F4 from BangGood.com – firmware update, wiring and configuration
Please consider supporting my work trough my Patreon page, I could really use some financial help so I could devote more time doing reviews and quadcopter related stuff. Thanks!
Yesterday I have received the long awaited Revo F4 flight controller board from BangGood, also known as Flip32 F4 and Flip F4. I have ordered it to replace the old Naze32 board that I was using for the past 2 years.
 It is the cheapest board on the market and judging by the reviews on Bang Good it seems that there are no complaints about the quality, so I have decided to order it and give it a try.
It is the cheapest board on the market and judging by the reviews on Bang Good it seems that there are no complaints about the quality, so I have decided to order it and give it a try.
There is no wiring diagram or manual, only small relatively understandable lettering on the back side and it, so I have done some searching and found that Ready to Fly Quads offers the same board for the same price, the only difference is that they have better description and more pictures of the board and also a detailed wiring description.
My board came with Betaflight 3.0.0 so before starting to configure it I have updated it to 3.0.1
The firmware flashing procedure is relatively simple, hold boot button, connect the board to usb and it should display DFU instead of COM port on the right corner of the Betaflight configurator, if not you should use Zadig in order to update the STM32 drivers. Please refer to this youtube video for the whole process of updating the firmware.
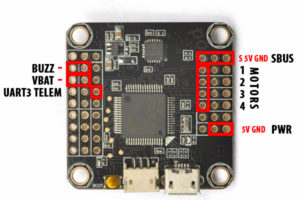 I have created the layout diagram on the right for anyone having problems understanding the existing diagrams that could be found on other websites. This is a bare minimum for my setup, no led control or current sensing only SBUS, motor connections, buzzer, VBAT, telemetry and powering the board from the motors rail (PWR).
I have created the layout diagram on the right for anyone having problems understanding the existing diagrams that could be found on other websites. This is a bare minimum for my setup, no led control or current sensing only SBUS, motor connections, buzzer, VBAT, telemetry and powering the board from the motors rail (PWR).
I’m using X4R SB receiver that is soldered directly to the SBUS, no need for hacking into the receiver in order to get an uninverted signal. The board is powered with 5v from my PDB. VBAT gets the voltage directly from the main battery connector cables.
And I’m using UART3 TX port to send telemetry data to my X4R SB receiver, one important thing to note is that you cannot just plug the telemetry wire from X4R on to the UART3 TX port since it will not work. You should follow the instructions found here (X4R-SB solution is at the bottom of the page) and solder the wire on the SOT23 transistor leg. If you need the technical aspects there is a really good explanation on the link above or you can just find the transistor and solder the wire on the specified leg.
[wp_ad_camp_2]
My board came with MSP enabled on UART1, you should disable that and enable Serial RX in order to enable SBUS working with X4R.
And if you feel lazy and if you aren’t sure if you are setting the board right, here is a dump of all settings that should work with the wiring diagram that I have provided. Stock pids, stock filtering, nothing changed except the rates but you can reset them to defaults.
Let me know if you need any further help or if this blog post had helped you.

The lucky owner of the Revo F4 flight controller is my modified QAV-R that had the top and bottom plates broken in a crash so I have had to convert it to nearly true X. Hardly waiting to have some more time to take it out on a test flight.








